|
赵东坡职称: 讲师(高校) 邮箱: dpzhao01@hdu.edu.cn 研究方向: 先进光学超精密制造及检测技术、结构拓扑优化理论与方法; 电话:15704483715 |
| 首页 个人概况 研究领域 教学与课程 科研项目 论文与著作 成果 荣誉及奖励 |
|
|
赵东坡职称: 讲师(高校) 邮箱: dpzhao01@hdu.edu.cn 研究方向: 先进光学超精密制造及检测技术、结构拓扑优化理论与方法; 电话:15704483715 |
|
最新更新
|
|
相关教师
|
|
个人简介
个人简历: 赵东坡,男,工学博士,硕士研究生导师,机械工程学会会员。主要从事超精密加工技术与功能微纳结构制造研究,重点开展复杂光学表面的超精密切削、微纳定位平台设计与高性能控制、微光学元件的增材与复合制造以及光学超精密测量方法与装备研究。聚焦功能微纳结构在光学调控、传热传质增强和液滴操控等方面的作用机理,并推动相关技术在航空航天、国防军工和集成电路等高端装备制造领域中的应用。近年来,主持国家自然科学基金青年项目、浙江省自然科学基金青年项目、国家重点实验室开发基金项目、以及浙江省属高校基本科研业务费项目各1项,企事业单位委托项目3项,参与国家重点研发计划项目2项,省级项目6项。截至目前为止,在微光学超精密制造与检测技术方面取得了一定的阶段性成果,在IEEE T. Ind. Electron.、Mech. Syst. Signal Pr.、Int. J. Mach.Sci.和J. Manuf. Process等机械工程领域权威期刊发表SCI论文30余篇,其中以第一/通讯作者发表TOP期刊8篇,发表EI检索论文1篇,中文核心论文2篇,CIRP国际会议论文1篇,授权国家发明专利6件,荣获教育部研究生国家奖学金2次。担任IEEE T. Ind. Electron, IEEE T Ind Inform., Mech. Syst. Signal Pr., 及Int. J. Mach.Sci.等多个重要期刊审稿人。 招生概况: %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 欢迎对数字、力学、机械创新设计、微纳米驱动与操作机器人、超精密加工及检测技术 或希望专注于工程研制的研究生加入我们! %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 1.课题组将结合个人兴趣与职业发展目标,共同制定契合的研究方向: ① 理论研究:柔顺机构拓扑优化、机械超材料构型设计等(偏重力学基础与建模) ② 创新设计:压电\电磁执行器、宏-微跨尺度驱动(偏重机械创新与前沿探索) ③ 工程研制:微操作与微装配机器人系统开发(偏重控制技术与系统集成创新)、微光学元件超精密加工(偏重工艺创新与装备研发)
2.培养特色及要求: ① 全过程化指导: 深入一线,共同开展研究、持续讨论、相互启发; ② 可行且具有前瞻性的课题: 可行靠谱甚至优秀的硕博士课题方向,对研究生的基本要求; ③ 兴趣与热情: 对科研(学术研究或工程技术)保持兴趣与热情,以提升科研能力为读研目标; ④ 踏实与追求: 能够“坐得住冷板凳”,踏实认直 不衍应付,追求高质量学术成果。 3.硕士生发展机遇: ① 研究团队与香港理工大学、华中科技大学、北京航空航天大学、南京理工大学、天津大学、中国科学院大学、哈尔滨工业大学、浙江大学、吉林大学、深圳大学、华南理工大学等有长期合作关系,学生将有机会去以上学校联合培养; ② 提供职业发展规划与指导,为学生就业、后续学术生涯发展提供支持。 学术活动: 2026年03月27日-03月29日:第四届特种加工青年学者论坛(广州) 2025年05月10日-05月13日:2025年切削先进技术研究会 (丹东) 2021年07月023日-07月25日:山东省机械装备与智能制造(淄博) 2019年9月01日-10月01日:静冈大学访问学者 (日本) 2019年1月07日-01月10日:第六届亚太光学制造会议(香港) 2018年9月13日-09月15日:第14届中日超精密加工国际会议CJUMP2018(哈尔滨) 2019年10月25日:吉林省增材制造学会第一届学术论坛(长春) 2018年:中国刀具协会切保削先进技术研究分会自动化加工技术与系统委员会学术会议(长春) 2017年11月19日-21日:第十三届中日超精密加工国际会议(上海) 2017年09月23日-25日:第一届切削仿真与制造技术国际学术会议(北京) 指导本科毕业学生: 2026年:黄鹤翔(上海大学)、涂启明(南京航空航天大学)、卢拓豪(南京航空航天大学)、冯骏航(北京航空航天大学国际创新研究院)、郑可豪、陈泸均 2025年:李梓豪(悉尼大学)、俞林银(浙江理工大学)、曾晓宝、黄律钧 教育经历
教育经历: 南京理工大学,机械工程,博士,导师:朱志伟 教授 长春工业大学,机械工程,硕士,导师:林洁琼 教授 博后经历: 天津大学,机械工程,博士后,导师:王福军 教授 工作经历
社会职务
社会职务:
[2] 中科院Top期刊IEEE T. Ind. Electron, IEEE T Ind Inform., Mech. Syst. Signal Pr., 及Int. J. Mach.Sci.等多个重要期刊审稿人 [1] 中国机械工程学会会员 |
|
研究领域
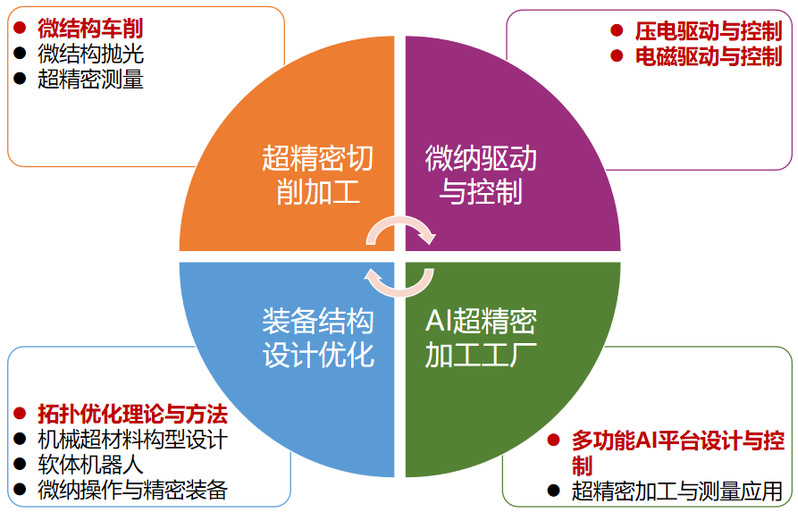
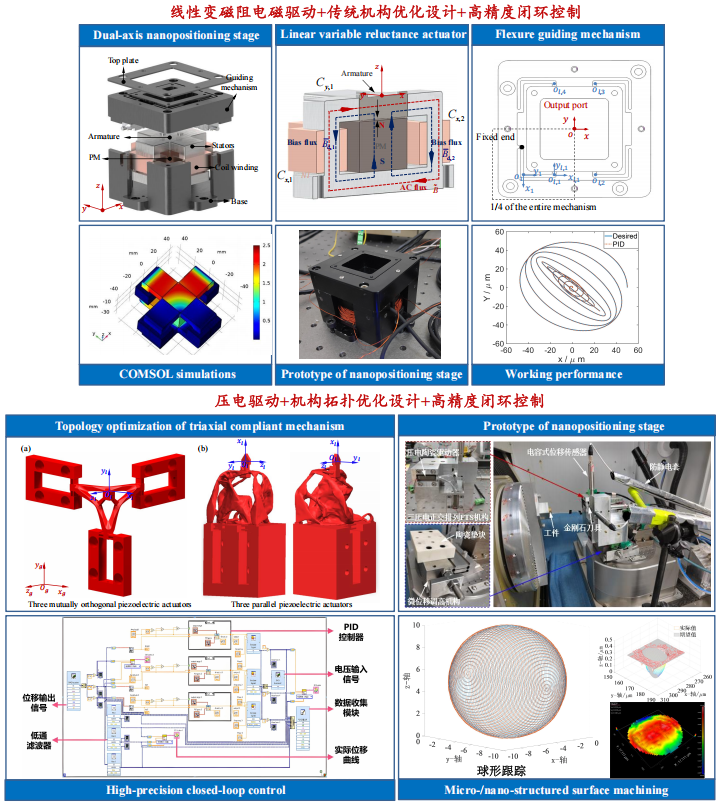
主要研究领域 微纳定位平台设计与控制:针对多轴纳米定位平台定位需求,开展基于压电叠堆、音圈电机、变磁阻驱动的纳米至毫米尺度的纳米精度定位装置设计理论,着重研究驱动器(音圈、变磁阻)解析建模与优化设计方法,研究柔性导向机构空间力学建模与拓扑优化设计方法,研究大负载主动磁路设计方法;针对位置控制,研究面向应用场景的高带宽、高鲁棒、高精度位置控制方法。
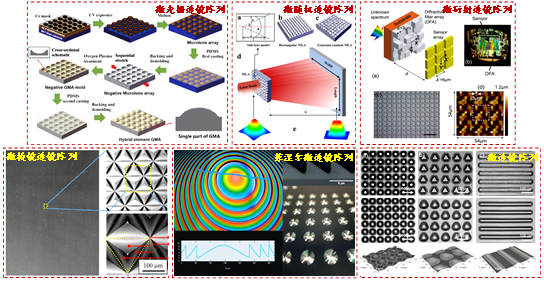
复杂光学表面超精密切削:针对光学自由曲面、微结构光学表面(如微透镜阵列、衍射微结构等)等表面复杂几何形状,围绕金属材料、光学晶体材料、特殊难加工材料等,开展基于单点金刚石刀具的超精密加工(车削、铣削、飞切等)新工艺、新方法与新装备的研究。
光学超精密测量方法与装备:研究基于非接触探针扫描与光学干涉原理的表面测量方法与装备,服务于微光学元件超精密加工的在位测量与补偿;研究基于显微视觉的空间位置跨尺度测量方法,研究基于激光干涉原理的空间位置测量方法,服务于微纳定位平台和超精密切削新装备的开发。 |
|
教学与课程
教学与管理: [1] 2025级智能制造工程本科班主任 教授课程: [1] 2025年,《设计与制造3》 [2] 2026年,《光电检测与传感技术》 |
|
横向科研
目前,主持GF类相关横向科研项目若干。 [3] 浙江省属高校基本科研业务费-青年支持专项-理工类,主持,在研 [2] GF类相关横向项目,主持,在研 [1] 学校科研项目-科研启动基金-基金,主持,在研
纵向科研
目前,主持国家自然科学基金青年项目、浙江省自然科学基金青年项目、浙江省高校基本科研业务项目等纵向课题。参与国家科技重大专项、国家自然科学基金、GF类等相关纵向项目若干。 [5] 国家自然科学基金青年基金,主持,在研 [4] 浙江省自然科学基金青年基金,主持,在研 [3] 全国重点实验室开放课题,主持,在研 [2] 国家自然科学基金委员会国家重点研发计划项目(政府间国际科技创新合作重点专项),核心骨干 [1] 国家自然科学基金联合基金重点项目,核心骨干 |
|
论文
主要论文成果 论文详情请参考 谷歌列表: https://scholar.google.com/citations?hl=zh-CN&user=nS0Hf2wAAAAJ Researchgate列表: https://www.researchgate.net/profile/Dongpo-Zhao SCI期刊论文 [17] Zhao D., Niu Y., Yin T., et al.. Design of a Novel Piezoelectrically Actuated Elliptical Vibration Cutting System Using Hexagonal-Element Topology Optimization and Its Control[J]. IEEE Transactions on Industrial Electronics, 2026. (SCI, IF=7.5, 唯一第一作者, 中科院分区:一区 TOP) [16] Zhao D., Yang Y, Zhu Z.*, et al. Design, Electromagnetic–Mechanical Modeling, and Evaluation of a Normal-Stressed Electromagnetic Dual-Axis Nanopositioning Stage[J]. IEEE Transactions on Automation Science and Engineering, 2026. (SCI, IF=7.9, 唯一第一作者, 中科院分区:二区 TOP) [15] Zhao D., Du H., Wang C., et al. Development of a novel decoupled dual-axial elliptical vibration-assisted cutting stage utilizing the stiffness matrix model and screw theory[J]. Measurement Science and Technology, 2026. (SCI, IF=3.4, 唯一第一作者, 中科院分区:三区) [14] Wang W., Wang D., Zhao D.*, et al. Design, modeling, and experimental validation of a fully decoupled piezoelectrically actuated compliant nano-positioning stage[J]. Smart Materials and Structures, 2025, 34(12): 125021. (SCI, IF=3.8,通讯作者, 中科院分区:三区) [13] Zhao D., Chen L.,Zhu Z., et al. Design and topology optimization of a novel normal-stressed electromagnetic XY nanopositioning stage[J]. IEEE Transactions on Industrial Electronics. 2025. Doi:10.1109/TIE.2025.35618 34. (SCI, IF=7.5, 唯一第一作者, 中科院分区:一区 TOP) [12] Zhao D., Zhu Z., Huang P., et al. Development of a piezoelectrically actuated dual-stage fast tool servo[J]. Mechanical Systems and Signal Processing, 2020, 144: 106873. (SCI, IF=10.2, 唯一第一作者, 中科院分区:一区 TOP,引用率:100) [11] Zhao D., Du H., Wang H., Zhu Z*. Development of a novel fast tool servo using topology optimization[J]. International Journal of Mechanical Sciences, 2023, 250: 108283. (SCI, IF=11.4, 唯一第一作者,中科院分区:一区 TOP,引用率:14) [10] Zhao D., Zhu B., Du H., Zhu Z.* Topology optimization of a dual-axial piezo-actuated fast tool servo with decoupled kinematics[J]. Precision Engineering, 2025. Doi.org/10.1016/j.precisioneng.2025.04.023 (SCI, IF=3.5, 唯一第一作者, 中科院分区:二区) [9] Zhao D., Xu H, Du H, et al. Hexagonal element-based topology optimization of dual-axial compliant mechanisms with decoupled kinematics[J]. European Journal of Mechanics-A/Solids, 2025: 105617.(SCI, IF=4.4, 第一作者, 中科院分区:二区) [8] Lu M., Chen B., Lin J., Zhao D.*, et al. Friction modeling of tool-chip interface based on shear-slip theory for vibration-assisted swing cutting [J]. Journal of Manufacturing Processes, 2020, 55: 240-248. (SCI, IF=6.2, 通讯作者, 中科院分区:一区 TOP) [7] Zhao D., Wang, H. Topology Optimization of Compliant Mechanisms Considering Manufacturing Uncertainty, Fatigue, and Static Failure Constraints.Processes,2023,11,2914. (SCI, IF=3.5, 唯一第一作者, 中科院分区:三区) [6] Lu M., Zhao D.*,, Lin J, Zhou, X, et al. Design and analysis of a novel piezoelectrically actuated vibration-assisted rotation cutting system[J]. Smart Materials and Structures, 2018, 27(9): 095020. (SCI,IF=3.543, 共同第一作作者, 2018 年中科院分区:二区) [5] Lu M, Wang H, Zhao D*, Lin J, et al. Improved differential evolutionary algorithm for nonlinear identification of a novel vibration‐assisted swing cutting system[J]. International Journal of Adaptive Control and Signal Processing, 2019, 33(7): 1066-1078. (SCI, IF=3.9, 通讯作者, 2019年中科院分区:三区) [4] Du H, Zhao D, Liu C, et al. Laser-assisted slow tool servo diamond turning of single-crystal silicon for fabricating micro-lens arrays[J]. Journal of Manufacturing Processes, 2024, 127: 174-183.(SCI, IF=6.1, 第二作者, 2024年中科院分区:一区TOP) [3] Lin J., Zhao D., Lu M., &Yi, A. Modeling and Analysis of a Novel Decoupled Vibration-Assisted Swing Cutting System for Micro/Nano-Machining Surface[J]. IEEE Access, 2018, 6: 70388-70396. (SCI, IF=4.098,第二作者, 2018年中科院分区:二区) [2] Lu M., Chen J., Zhao D., Lin J.*, et al. Modeling and realization of workspace analysis of a piezoelectric actuator 2-DOF vibration-assisted swing cutting system[J]. Applied Nanoscience, 2019: 1-9. (SCI, IF=3.198,第三作者, 2019年中科院分区:二区) [1] Hussain I., Xia W., Zhao D., et al. Multi-Physical Design and Resonant Controller-Based Trajectory Tracking of the Electromagnetically Driven Fast Tool Servo. Actuators. Multidisciplinary Digital Publishing Institute, 2020, 9(2): 28. (SCI, IF=2.523, 第三作者, 四区) 中文期刊论文 [2] 林洁琼, 赵东坡, 卢明明, 谷岩, 陈斌. 并联驱动振动辅助旋转运动装置的设计与分析[J]. 电加工与模具[J], 2019(01): 60-63 [1] 卢明明, 陈斌, 周家康, 林洁琼, 赵东坡. 混联压电式三维椭圆振动切削过程中的颤振现象[J]. 科学技术与工程, 2018,18 (06): 133-137. 会议期刊论文 [4] Niu Y., Zhao D., Huang P., et al. Two-stage topology optimization for a piezo-actuated fast tool servo based on the velocity field level set method[J]. Procedia CIRP, 2023, 119: 626-631. [3] Lin J., Zhao D., Lu M., Zhou J. Design and analysis of a 3D Elliptical Micro-Displacement Motion Stage[J]. IOP Conference Series Materials Science and Engineering, 2017, 274 [2] 林洁琼, 赵东坡, 卢明明. 一种并联驱动振动辅助旋转运动装置的设计与分析[C]. 第17届全国特种加工学术会议, 2017:1 [1] 林洁琼, 赵东坡, 卢明明. 一种三压电垂直驱动三维椭圆微位移运动平台的研制[C]. 第十四届切削与先进制造技术学术会 仪,2016,46(13):139-147 著作
|
|
专利成果
国家发明专利 [14] 赵东坡,杨玉柔,陈宏伟,陈占锋,王文.一种基于线性变磁阻驱动与柔性铰链的双轴纳米定位平台及方法[P]. 国家发明专利:202610357982.2, 2026-04-02. (国家发明专利,第一发明人) [13] 杨天学,赵东坡,杨玉柔,邓棵元,陈宏伟,刘文迪,倪梓涵.一种大行程-高频响级联跨尺度刀具伺服装置及控制方法[P]. 国家发明专利: 202511940597.2, 2026-01-05. (国家发明专利,本科生第一发明人) [12] 赵东坡,梅伯宇,张钰涵,陈宏伟,杨玉柔,杨天学.一种杠杆位移放大双轴完全解耦快速刀具伺服装置及其拓扑优化方法[P]. 国家发明专利: 202610005980.7, 2026-01-05. (国家发明专利,第一发明人) [11] 朱志伟, 赵东坡, 朱紫辉, 黄鹏, 陈栎, 卞雷祥. 级联跨尺度刀具伺服装置及其高频控制方法[P]. 国家发明专利, 专利号: CN111487922B, 2021-08-03. (国家发明专利,除博士导师以外第一发明人) [10] 朱志伟, 赵东坡, 黄鹏, 牛禹涵. 一种拓扑优化双轴完全解耦刀具伺服装置及其设计方法[P], 国家发明专利: CN202311185607.7, 2023-09-14. (国家发明专利,除博士导师以外第一发明人) [9] 林洁琼, 卢明明, 赵东坡.一种振动辅助金刚石刀具旋转车削装置[P]. 国家发明专利, 专利号:201710299541.2, 2017-04-30. (国家发明专利,除硕士导师以外第二发明人) [8]赵东坡,黄鹤翔,张钰涵,杨天学,邢宏辉,梅伯宇.一种人体工学视力保护功能的视护臂装置[P].国家发明专利:202511435449.5[P].2025-12-26.(国家发明专利,第一发明人) [7] 赵东坡, 陈占锋, 张钰涵, 刘萌萌, 梅伯宇,关鹏, 黄鹤翔. 一种电磁驱动双轴纳米定位平台及其设计方法[P]. 国家发明专利: 202510184098.9, 2025-02-19. (国家发明专利,第一发明人) [6] 赵东坡, 王文, 王登俊, 卢科青, 陈占锋,王传勇.一种新型解耦双轴椭圆振动辅助切削平台及其控制方法[P]. 国家发明专利: 202510024105.9, 2025-01-07. (国家发明专利,第一发明人) [5] 赵东坡, 王登俊, 王文, 王传勇, 卢科青, 陈占锋, 鲍雷. 一种基于自适应网格划分的平面双轴微纳米定位平台建模方法[P]. 国家发明专利: 202510077975.2, 2025-01-17. (国家发明专利,第一发明人) [4] 赵东坡, 梅伯宇, 陈占锋, 黄鹤翔, 顾紫莹, 楼岸东. 一种杠杆位移放大三轴完全解耦刀具伺服装置及方法[P]. 国家发明专利: 2025103040865, 2025-03-14. (国家发明专利,第一发明人) [3] 卢明明, 林洁琼, 赵东坡, 周刚, 王浩, 陈斌, 谷岩, 韩金国. 并联驱动振动辅助旋转车削方法[P]. 国家发明专利: CN201710795115.8, 2023-03-31. (国家发明专利,除硕士导师以外第二发明人) [2] 卢明明, 谷岩, 赵东坡, 林洁琼.一种基于锐角直板型柔性铰链的振动辅助旋转切削装置[P]. 国家发明专利, 专利号: 201710299320.5, 2017-04-30. (国家发明专利,除硕士导师以外第二发明人) [1] 林洁琼, 卢明明, 郭庆, 赵东坡, 谷岩. 一种多轴协同运动的机载相机地面运动测试装置[P]. 国家发明专利, 专利号: 20181041539 7.9,2018-11-16. (国家发明专利,除硕士导师以外第三发明人) 软件成果
|
|
荣誉及奖励
[13] 2025年,机械机械工程学院院级考核优秀 [12] 2025年,机械工程学院优秀教职工系列“科研之星” [11] 2025年,第十九届“挑战杯”大学生课外学术科技作品竞赛,省银奖,第一指导教师 [10] 2025年,杭州电子科技大学 硕士生导师 [9] 2023年,博士研究生国家奖学金、优秀研究生
[7] 2021年,吉林省省级优秀硕士学位论文 [6] 2021年,第六届中国国际“互联网+”大学生创新创业大赛国际赛道金奖 [5] 2020年,南京理工大学一等研究生奖学金 [4] 2018年,硕士研究生国家奖学金;校级优秀硕士论文 [3] 2018年, 一等硕士研究生奖学金 [2] 2017年,第十九届中国科协年会,授予吉林省“优秀志愿者”称号 [1] 2016年,校荣誉毕业生 |
|
研究领域
教学与课程
科研项目
成果
|